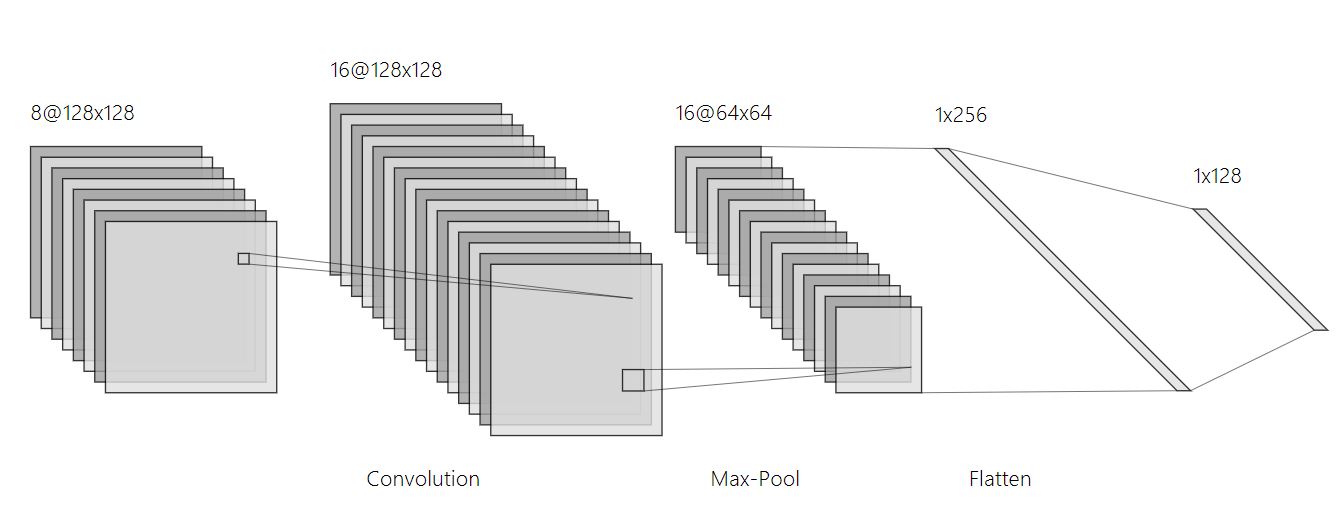
이번 포스터에서는 Convolution Layer을 거쳐서 나온 Feature maps을 Resizing 하여 새로운 Layer를 얻는 폴링 계층(Pooling Layer) 에 대해 알아보자.
폴링 계층(Pooling Layer)
CNN 알고리즘을 구성하는 필수적인 layer 중 하나인 Pooling Layer는 주로 Convolution Layer 연산을 거쳐 나온 Feature map이나 마지막 출력을 할 때 사용이 된다.
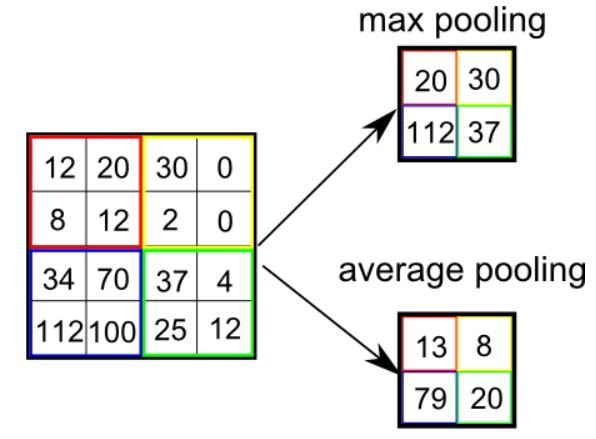
Pooling Layer에서 사용하는 필터는 값이 따로 존재하지 않고 단지 ‘기능’을 수행한다. 즉, Matrix 연산을 사용하지 않고 이미지의 픽셀로부터 값을 뽑아내는 역할을 한다. 다른 Filter들과 동일하게 Size와 Stride을 설정할 수 있꼬 보통 Size는 2x2를 사용하고 Stride는 Size에 맞게 2로 설정한다.(stride를 1로 설정하여 overlapping을 할 때도 있다.)
Pooling Layer 특징
Pooling Layer 특징은 다음과 같다.
- Convolution Layer 다음에 사용이 된다.
- 각 Feature Map에 대해 독립적으로 적용된다.
(feature map의 channel이 3이면, pooling Layer의 channel도 3이다.) - Feature Map의 Size를 줄인다.(DownSampling)
- 전체적으로 파라미터의 수와 연산량을 줄인다.(Computation 효율 증가)
- 작게나마 Overfitting에도 효과가 있다.(어느 정도 있다고는 한다….)
Pooling Layer의 종류
Pooling Layer읠 종류로는 약 4가지가 있다. 물론 Min-Pooling은 거의 사용하지 않지만, 그래도 Max가 있으면 그 반대도 있기 마련이기에 개념은 존재한다.
Min-Pooling
제목 그대로 2x2 Filter를 이용해 최솟값을 추출하는 방법이다. 물론 max가 있다면 min이 있는 건 당연하지만, Google에 검색을 아무리 해도 Min-Pooling을 사용하는 이유에 대해서는 정확히 언급된 사항이 없다. 최솟값을 추출하기 때문에 이미지가 전체적으로 어두어지는 효과가 있다.
사용을 너무 안 하는 나머지 pytorch에서도 따로 메소드를 제공하지 않는다….나중에 구현해봐야겟네
Max-Pooling
Min과 반대로 최대값을 추출하는 방법이다. 대부분의 pooling Layer들은 Size와 Stride을 2로 고정한다. 픽셀값 중 최대값을 추출하기 때문에 적용이 된 이미지는 보통 튀는 부분이 부각된다. Edge Filter와 비슷한 기능을 한다고 생각할 수 있다.
Pytorch 코드는 다음과 같다.
import torch.nn as nn
import torchvision.transforms as transforms
import PIL.Image as Image
import numpy as np
import matplotlib.pyplot as plt
img = Image.open('../data/example.jpg')
maxpool = nn.MaxPool2d(kernel_size=(2,2), stride=2)
img_tensor = transforms.ToTensor()(img)
img_maxpool = maxpool(img_tensor)
img_size = img.size
maxpool_size = np.array(img_maxpool).shape[1:]
plt.figure(figsize=(10,10))
plt.subplot(1,2,1)
plt.imshow(img)
plt.axis('off')
plt.title(f'Original {img_size}')
plt.subplot(1,2,2)
plt.imshow(np.array(img_maxpool.permute(1,2,0)))
plt.axis('off')
plt.title(f'MaxPool {maxpool_size}')
plt.savefig('maxpool_result.jpg', bbox_inches='tight')
nn.MaxPool2d(): 2d라는 건 2차 Tensor에서 사용하는 MaxPooling Filter라는 뜻이다.kernel_size와stride옵션을 통해 크기를 설정할 수 있다.
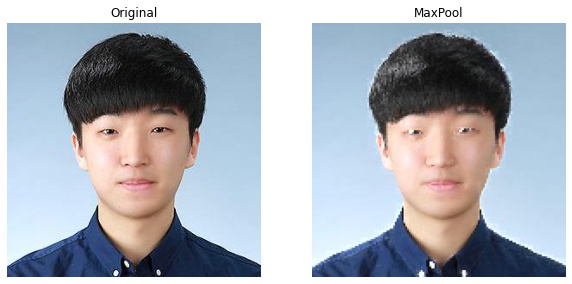
사실 위 사진에서는 튀는 부분을 부각?했다는 느낌은 들지 않지만 그래도 Maxpool이 적용된 사진을 보면 주위에 비해 유난히 튀는 부위만 남아있는 모습을 볼 수 있다.
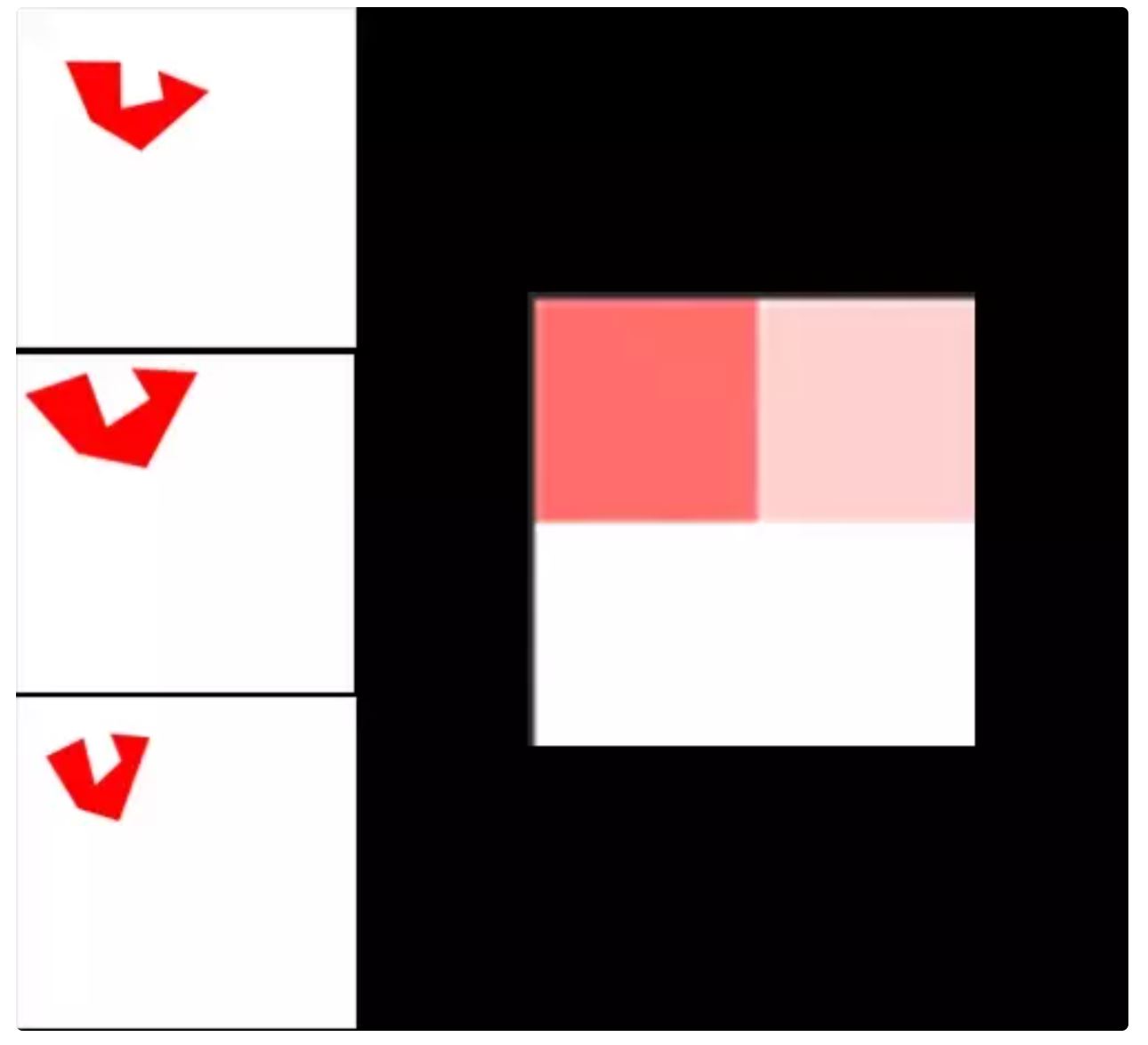
Max-Pooling Layer의 가장 큰 장점은 Translation Invariance의 효과이다. 이미지 내에 있는 물체가 이동을 해도 결과에는 변화가 없다는 뜻이다. 즉, 물체의 ‘고유’한 특징을 잘 잡아낼 수 있다.
아래 사진은 Translation Invariance을 가장 잘 보여주는 예시이다.
Average-Pooling
최솟값과 최댓값을 추출했다면, 마지막으로 평균 값을 추출하는 Pooling Layer도 있다. 느낌적으로 알 수 있듯이 주위 픽셀값의 평균은 곧 ‘불러’ 효과를 준다. 노이즈를 줄이는 효과가 있다고 한다.
img = Image.open('../data/example.jpg')
avgpool = nn.AvgPool2d(kernel_size=(2,2), stride=2)
img_tensor = transforms.ToTensor()(img)
img_avgpool = avgpool(img_tensor)
img_size = img.size
avgpool_size = np.array(img_avgpool).shape[1:]
plt.figure(figsize=(10,10))
plt.subplot(1,2,1)
plt.imshow(img)
plt.axis('off')
plt.title(f'Original {img_size}')
plt.subplot(1,2,2)
plt.imshow(np.array(img_avgpool.permute(1,2,0)))
plt.axis('off')
plt.title(f'AvgPool {avgpool_size}')
plt.savefig('avgpool_result.jpg', bbox_inches='tight')
nn.AvgPool2d(): Max Layer와 동일하게 각종 옵션을 통해 크기를 설정할 수 있다.
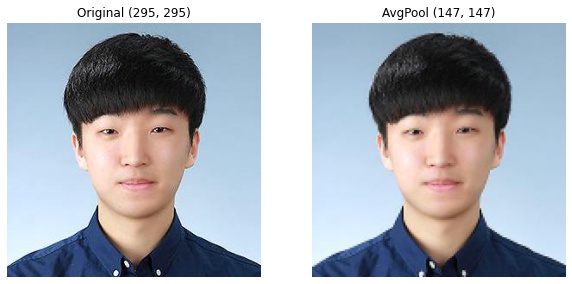
사진을 보면 아주 미세하게 흐려진 것을 알 수 있다. Blur 효과가 적용되었다는 뜻인데, 보통 노이즈를 줄이는 효과가 있다.
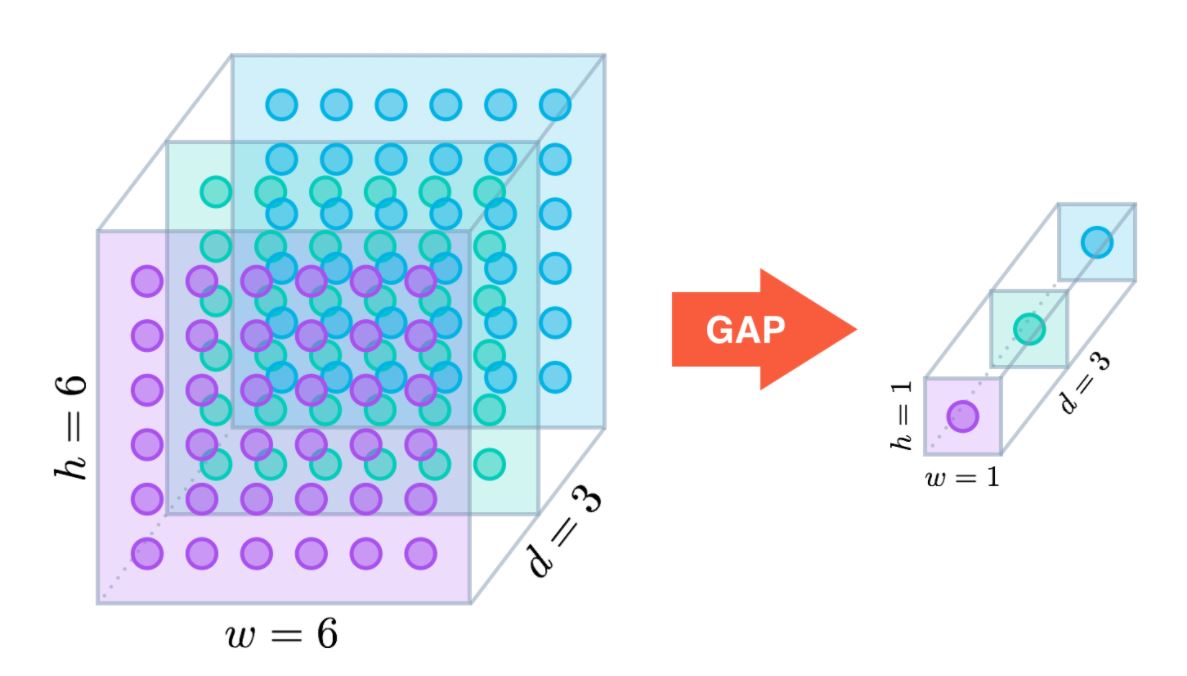
Global Average-Pooling
사실 Average-Pooling Layer도 잘 사용하지 않는 추세이다. 단지 Blur의 효과를 얻기 위해서 사용하기에는 효율적이지 못 하기 때문이다. 하지만 Global Average-Pooling Layer는 여러 유명한 모델에서 사용되고 있다. Average-pooling Layer와 비슷한 개념이지만, 좀 더 넓은 범위에 대해 적용이 되기 때문에 Global이라는 단어가 추가되었다.
Global Average-Pooling의 원리는 간단하다. 2x2, 3x3 등의 Filter를 이용하는 것이 아니라 Feature Map 전체에 대해 평균을 계산한다. 결국 Feature Map 1개당 1개의 벡터값이 나온다고 할 수 있다.
아래는 Global Averge Pooling Layer를 구현한 코드이다. Pytorch에서 따로 제공하는 메소드는 없고 Average-pooling Layer의 메소드를 활용해서 구현한다.
img = Image.open('../data/example.jpg')
img_tensor = transforms.ToTensor()(img)
input_image = img_tensor.unsqueeze(0)
>>> print(input_image.shape)
#torch.Size([1, 3, 295, 295])
conv = nn.Conv2d(3,10,3)(input_image)
conv_shape = conv.shape
>>> print(conv_shape)
# torch.Size([1, 10, 293, 293])
global_avgpool = nn.AvgPool2d(kernel_size=conv_shape[2:])
>>> print(global_avgpool(conv))
# tensor([[[[ 0.2456]],
# [[ 0.1059]],
# [[ 0.2954]],
# [[ 0.2536]],
# [[-0.0453]],
# [[-0.0066]],
# [[-0.0869]],
# [[-0.2485]],
# [[ 0.3848]],
# [[-0.4621]]]], grad_fn=<AvgPool2DBackward>)
unsqueeze(): Convolution Layer의 입력값은 (batch, channel, W, H)이기에 batch의 차원을 하나 더 추가할 필요가 있다.conv_shape[2:]: Filter의 size를 입력되는 feature map의 size로 설정하면 Global Average pooling이 된다.stride: 어차피 Filter의 size가 곧 Feature Map의 size이기에 움직일 필요가 없다.
(어떤 값이든 상관이 없다.)
Global Averge Pooling Layer(GAP)의 가장 큰 장점은 기존에 CNN에서 사용하던 Fully-connected Layer를 대체할 수 있다는 것이다. 대부분의 모델에서 파라미터의 수에 가장 큰 영향을 주던 부분이 Classifier를 하던 FC Layer이다. 따라서 이 부분을 대체함으로서 파라미터의 수를 급격하게 줄일 수 있었다.
또한 또 다른 장점으로는 GAP를 사용하면 Model을 좀 더 ‘Interpretable`하게 만들 수 있다는 것이다. 사람이 봤을 떄 좀 더 직관적으로 이해할 수 있도록 해주는 효과가 있다는 뜻이다.
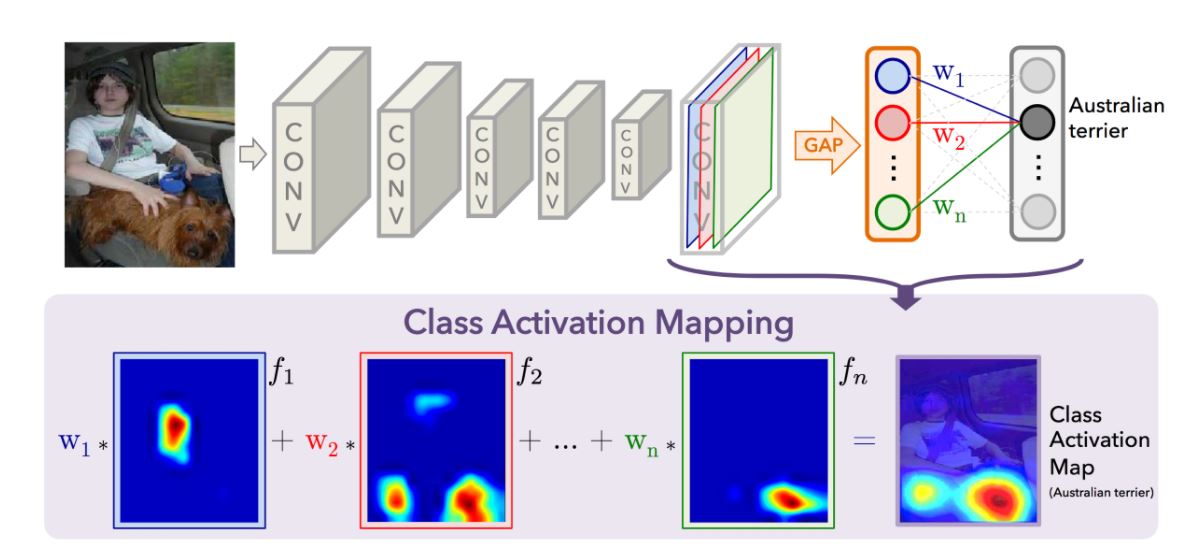
Feature Map과 카테고리의 관계에 직접적으로 영향을 줘서 ‘공간정보’에 대한 손실을 최소화할 수 있다.
이 밖에도 여러가지 장점이 있다.
- 고정된 입력 size가 필요없다.(FC의 경우 고정된 input size가 필요하다.)
- 결론적으로 파라미터의 수를 감소시키기 때문에 과적합도 방지한다.
Adaptive Pooling Layer
Pytorch에서 pooling Layer를 검색하면 Adaptive Pooling Layer도 있다는 것을 알 수 있다. 이 Layer의 경우에는 다양한 입력값의 크기에 따라 변할 수 있는 pooling Layer를 말한다. 즉, 위에서 언급한 Max, Average Layer들은 Filter와 stride가 하이퍼 파라미터이기 때문에 사용자가 직접 설정을 해줘야한다. 만약 input size가 변하면 그럴때마다 Filter와 Stride를 변경해줘야 하는 번거로움이 있다.
하지만 Adaptive Pooling Layer는 output size를 설정해줌으로써 어떤 input size가 들어와도 사용자가 정의한 ouput size에 맞게 Filter의 size와 stride를 자동으로 설정해준다.
nn.AdaptiveMaxPool2d: Max에 대한 Adaptive Poolingnn.AdaptiveAvgPool1d: Average에 대한 Adaptive Pooling
원하는 output size가 (10x10)이라고 가정하면 코드는 다음과 같다.
adap_pool = nn.AdaptiveAvgPool2d(output_size=(10))
plt.figure(figsize=(10,10))
plt.subplot(1,2,1)
plt.imshow(img)
plt.axis('off')
plt.title('Original (295, 295)')
plt.subplot(1,2,2)
plt.imshow(np.array(adap_pool(img_tensor).permute(1,2,0)))
plt.axis('off')
plt.title('Adaptive Average Pooling (10,10)')
plt.savefig('adaptive_pool.jpg', bbox_inches='tight')
output_size: (10)=(10x10)을 의미한다.
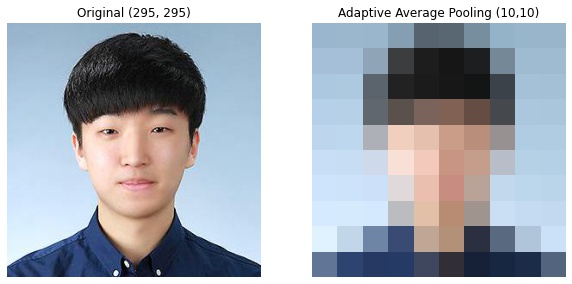
사용자가 원하는 ouput_size만 설정하면 되기 때문에 모델을 설계할 때 매우 유용하게 사용될 것 같다.
Layer들에 대해 설명을 하면서 각각의 장점에 대해 언급을 했다. 가장 큰 이유로는 이미지의 사이즈를 줄여 연산량을 줄이는 DownSampling을 하기 위해서이고, Convoultion Layer에서 추출한 정보들을 좀 더 강화하기 위해 사용하기도 한다. 따라서 Convolution Layer와 떨어질 수 없는 한 세트라고 생각해야한다.
지금까지 pooling Layer들의 종류에 대해 알아보았다. CNN을 다룬다면 반드시 나오는 Layer이기 때문에 자세히 알아두면 매우 좋을 것 같다. 사실 위에서 언급한 Layer들 말고도 Max와 average를 혼합한 테크닉도 있다. 나중에 기회가 된다면 좀 더 발전된 Pooling Layer들에 대해 다뤄보도록 하겠다.